Visão computacional

Visão Computacional Contra Espécies Invasoras: Identificando Coral-Sol com YOLOv8
Imagine monitorar recifes de coral manualmente, mergulhando em águas profundas ou analisando horas de vídeo subaquático. Agora, pense em automatizar esse processo com inteligência artificial, acelerando a detecção de espécies invasoras como o coral-sol (Tubastraea coccinea). Foi exatamente isso que exploramos em nosso projeto de visão computacional, usando YOLOv8 para identificar e contar colônias dessa espécie em imagensubaquática.
Neste post, vou compartilhar os desafios, resultados e lições aprendidas de um projeto em gruopo da Disciplina Visão Computacional (INE410121 - VISÃO COMPUTACIONAL) ministrada pelo professor Aldo von Wangenheim. Integrantes: Lucas Fiamoncini Thiago Silveira Marcelo Crivellaro Thayssa Godoi
O Problema: Coral-Sol e a Invasão Silenciosa
O coral-sol é uma espécie invasora que se espalhou rapidamente pelo Atlântico, competindo com espécies nativas e alterando ecossistemas marinhos. Tradicionalmente, seu monitoramento é feito por:
- Mergulhadores (caro e limitado pela logística);
- ROVs (Veículos Subaquáticos Remotos) (gera um volume enorme de imagens para análise manual).
A pergunta que nos guiou foi: Como a visão computacional pode tornar esse processo mais rápido e preciso?
A Solução: YOLOv8 e um Banco de Dados Subaquático
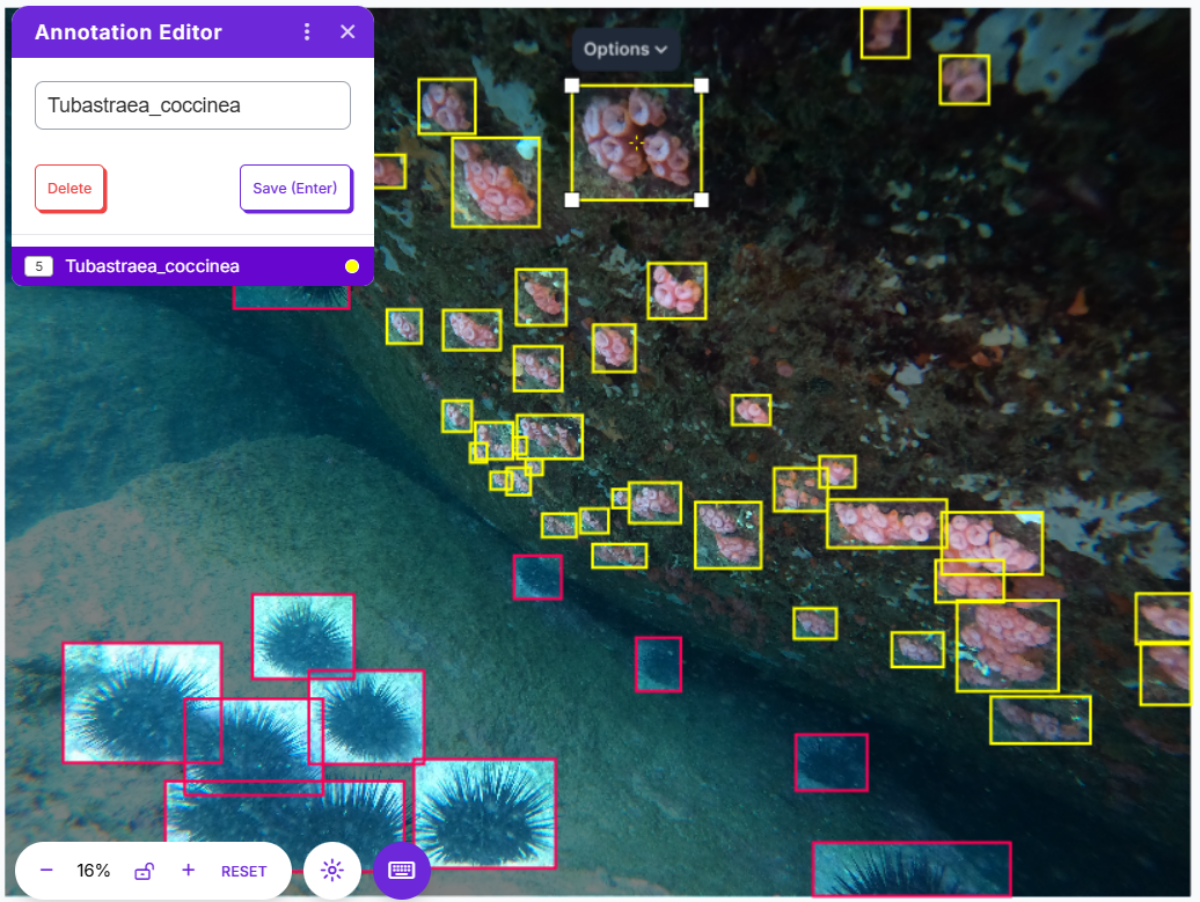
1. Coleta e Anotação de Dados
Usamos imagens da Reserva Biológica Marinha do Arvoredo (SC), capturadas com câmeras GoPro e Olympus. O desafio? Anotar manualmente 239 imagens no Roboflow, marcando:
- Coral-sol (nosso alvo principal);
- Algas turf;
- Palythoa caribaeorum (um coral nativo);
- Ouriços-do-mar.
2. Treinamento do Modelo
Optamos pelo YOLOv8, um dos modelos mais eficientes para detecção em tempo real. Configuramos:
- 50 épocas de treinamento;
- Batch size = 64;
- Imagens redimensionadas para 640x640 pixels.
Para melhorar a generalização, aplicamos data augmentation (rotações, ajuste de brilho, cortes aleatórios).
Resultados: Onde o Modelo Acertou (e Errou)
Desempenho Geral
| Classe | Precisão | Recall | mAP50 |
| Tubastraea coccinea | 0.607 | 0.716 | 0.676 |
| Algae turf | 0.404 | 0.200 | 0.193 |
| Palythoa caribaeorum | 0.341 | 0.278 | 0.246 |
| Sea urchin | 0.662 | 0.737 | 0.733 |
O modelo teve bons resultados para coral-sol (mAP50 = 0.676), mas:
✅ Detectou bem colônias isoladas e maiores;
❌ Teve falsos positivos (confundiu fundo ou outras espécies com coral-sol);
❌ Subestimou colônias em imagens borradas ou com má iluminação.
Desafios e Lições Aprendidas
- Desbalanceamento de Classes
- Espécies raras (como algas turf) tiveram baixa acurácia. Solução possível: Mais dados ou oversampling.
- Problemas com Imagens Subaquáticas
- Água turva e variação de luz afetaram a detecção. Ideia para futuro: Usar pré-processamento (ex.: algoritmos de correção de cor).
- Contagem Imperfeita
- O modelo não substitui totalmente a análise humana, mas reduz drasticamente o tempo de triagem.
Próximos Passos: O Futuro do Monitoramento Automatizado
- Testar em outros habitats (plataformas de petróleo, onde o coral-sol é comum);
- Explorar segmentação por instância (ex.: Mask R-CNN) para colônias sobrepostas;
- Integrar drones submarinos para captura contínua de imagens.
Conclusão: IA a Serviço da Conservação
Este projeto mostrou que a visão computacional já é viável para monitoramento ambiental, mesmo com desafios como imagens subaquáticas complexas. Ainda há espaço para melhorias, mas a automação pode revolucionar a gestão de espécies invasoras, tornando-a mais rápida, barata e escalável.
Dale! 🚀
Referências
- Creed et al. (2017). The Sun-Coral Project: The first social-environmental initiative to manage the biological invasion of Tubastraea spp. In Brazil. Management of Biological Invasions, 8(2), 181–195. https://doi.org/10.3391/mbi.2017.8.2.06
- Beijbom et al. (2015). Towards Automated Annotation of Benthic Survey Images: Variability of Human Experts and Operational Modes of Automation. PLOS ONE, 10(7), e0130312. https://doi.org/10.1371/journal.pone.0130312
Roboflow